Introduction
In previous discussions, we touched upon the foundational aspects of this project. It is now time to delve into the heart of our endeavour, providing a detailed exploration of the specific requirements guiding our design choices for the robotic kit. This deeper insight will reveal the rationale behind our decisions, offering a clear perspective on our objectives.
I have already shared a bit about what we need from this project in earlier discussions. Now, let’s dive deeper into the heart of what I’m aiming to create. We’ll explore the specific requirements that are shaping our design choices for the robotic kit, giving you a closer look at what drives our decisions.
Missions
The missions encapsulate the primary functions expected of the robotic kit, with an emphasis on excellence in performance. Following our earlier discourse, we have delineated three mission requirements for the robot:
As previous discussed there are three missions requirements for the robot.
1) Environment Navigation: Seamlessly moving through its Environment
2) The robot will avoid obstacles: Identify and navigate around hazards to ensure safe passage
3) The robot will follow lines: Smoothly follow lines
These missions will be further clarified as part of the user requirements
Key User Requirements
Listing all of the requirements within this post would be impractical, beyond the scope of this post and uninteresting. Those interested in seeing the full document with link provided at the end of this post.
Instead, we will be looking at more relevant requirements that will be defining the robotic system.
Mission Requirements
The initial set of requirements pertains to the missions outlined above, aiming to further specify the operational parameters of the robotic kit.
General Requirements
These are requirements are applicable to all three missions.
| Goal | Target |
|---|---|
| Operate in a human environment | room, house, large room or outdoors |
| Move by self power | Have its own means of propulsion |
| Move around on the ground | Carpet, tiles, wood or concrete |
| Operate in optimal outdoor conditions | Dry weather with no or minimal water/dampness on the ground |
Navigation Requirements
Requirements detail the expected navigation capabilities of the robot:
| Goal | Target |
|---|---|
| Be able to use different types of route planning algorithms | VRF, bug, etc |
| Be able to use user defined waypoints for navigation | Coordinate points on a map |
| Able to tell where the robot is | coordinate point on a map, relation to where it started |
| Be able to tell how fast the robot is moving | RPM, m/s etc |
| Be able to tell which direction the robot is heading | Bearing |
| Be able to measure individual wheel speed | RPM measurement on each wheel |
Obstacle Avoidance Requirements
Specifications for navigating around obstacles include:
| Goal | Target |
|---|---|
| Able to detect obstacles from reasonable distance | 10-20cms |
| Use algorithms or other methods to move around obstacles and reach the end waypoint | Bug, VRF or others |
| Not hit obstacles | |
| Not get stuck avoiding obstacles |
Line Following Requirements
Specifications for navigating around obstacles include:
| Goal | Target |
|---|---|
| Be able to detect a line | thickness of a ballpoint pen to a blackboard marker |
| Be able to detect colours | At a minimum Black, Blue, Red and Green |
| Able to follow lines smoothly | PID style of control |
| Be able to turn around corners | Maybe 90deg turns? most definitely curved turns. |
| Potentially be able to transition from one line to another | i.e. go from black to red |
| Be able to find the line and start moving along it |
Robotic Control Systems
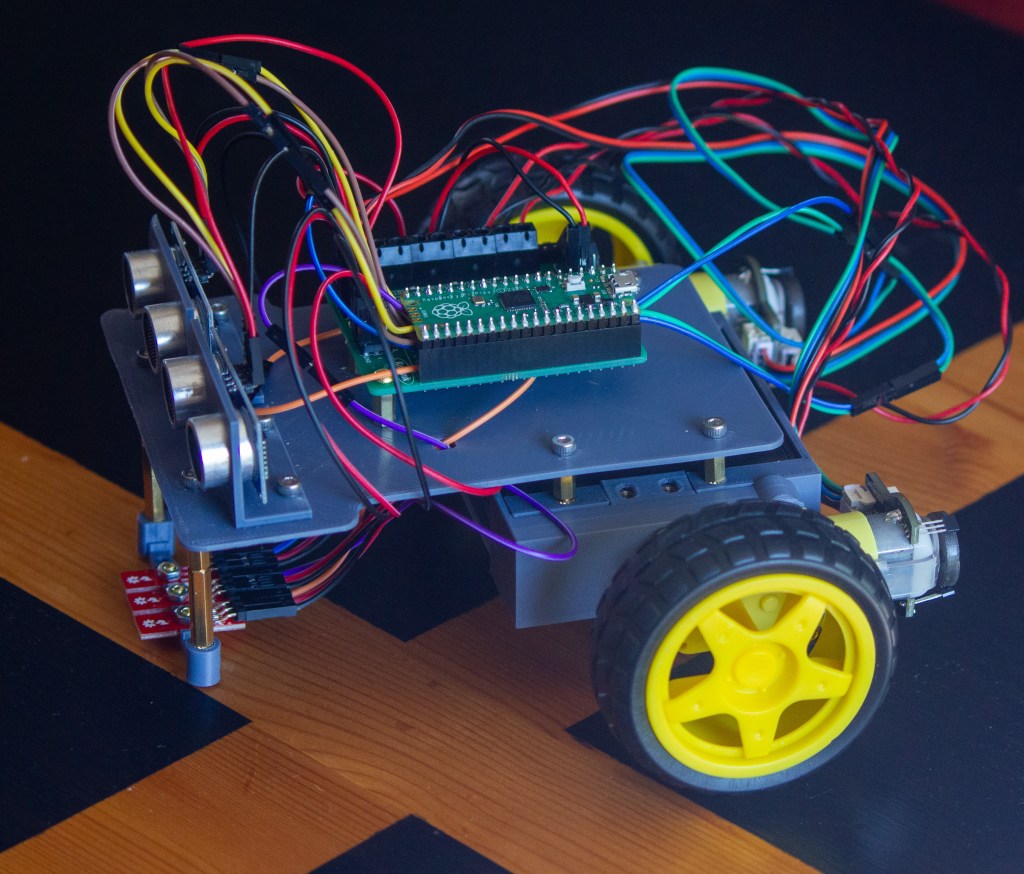
This is one of the key areas where I aim to improve from my previous robot designs. Instead of just soldering wires and sticking wires to a Raspberry Pi, I want to create a truly modular system that can allow for effective modularity. To realise this ambition I will need robust requirements to allow for
| Goal | Target |
|---|---|
| The system will use a databus to interface with each modules | SPI, I2C, UART or others |
| There will be a use of standard IO ports for interfacing with modules | RJ11, RJ45 and/or USB type C |
| There should be a way for the user to interface with the robotic system | Buttons and other methods of inputs |
| The robotic system should inform the user | Digital displays, lights, sounds or other means |
| The system shall be able to monitor failures and self calibrate | Use BITE or other methods checking |
Power Distribution
Power distribution was an issue with my last two robot designs as they both used AA cell batteries which would die quickly. This was neither economical nor was it sustainable as I had to keep replacing the batteries. The new requirements reflect the lessons learnt from my previous ventures and should allow for further expandability.
| Goal | Target |
|---|---|
| Power system should distribute power on a rail | |
| There should be a single voltage and amp | |
| The power input should be agnostic to country or location | I.E. use USB type C for power input |
| There should be a switch to turn on or off the power distribution to modules | |
| There should be a switch to turn on or off the whole robot system | |
| Have power converters in the modules | power regulators |
| Monitor power distribution |
Sustainability
I don’t have the resources of large institutions for designing and building this robotic kit. which limits my options. Therefore, my goal is to ensure that I follow the principles of right first time with as little waste as possible and future reusability in mind. Thus the following requirements are meant to reflect some of this.
| Goal | Target |
|---|---|
| Waste as little material during design and development | up to 20% addition material use |
| The energy source should be rechargeable and easily replaceable | Not use things like AA cells nor fuel cells. Not store energy source in a way that not accessible |
| There should be attempts made to try and reuse plastic for 3D printed parts | |
| Before constructing, a model of the robot should be made to test the robots ability function | CAD model and a Software model of some kind |
Conclusion
In this post, we’ve covered the main goals and design ideas behind our robotic kit project, focusing on how it needs to be functional, adaptable, and sustainable. We’re doing more than just building a robot; we’re creating a versatile tool designed to tackle specific problems. I’m pretty new to setting up requirements from a customer’s point of view, especially when it comes to sustainability, so there’s a lot for me to learn as I go along. I expect to get better at including these considerations in future projects.
Keep in mind that what we’ve discussed here are the customer’s requirements, which might not cover everything for the final design. We’ll need to dig deeper and refine these ideas to make sure the end product is exactly what I’m aiming for. So, in the next post, we’ll start looking into the System Level Requirements, taking another step forward in our project.

Leave a comment